


转载:抛光机器人力位混合控制思路与方式
2022-09-13 22:35:07 0次
如果我们对位置闭环,那就无法控制力。如果我们对力闭环,那就无法控制位置。那么,如何实现位置和力的同时控制呢?就像我们的人手一样。于是,于是就有了阻抗控制的概念,即我们用位置闭环去控制机械臂末端,但是末端具有一定的刚度,与外界接触时会表现出力的特征。这种刚度可以从机械设计上实现,比如柔性关节SEA。也可以从控制算法上实现,比如阻抗/导纳控制。
我们统称为“阻抗控制”;一般的,阻抗控制是直接控制力(电流)的方式;导纳控制是通过控制位置来控制力;无论是阻抗控制还是导纳控制,都可以调节阻抗特征的,只是阻抗控制无法模拟高刚度,导纳控制无法模拟低刚度,而且这种限制并不来源于理论,而是由于控制量不相同,工程中的传感器测量有误差和延时导致;
理论分析:任何物体间的接触,都可以等效为两个“阻尼质量弹簧”模型,之间的接触举个例子,人擦玻璃,玻璃的弹簧刚度K可以认为是无穷大(没有弹性),人手的刚度K就需要比较小(有弹性),这样才能适应玻璃表面,完成擦拭工作;再比如,拿刀切肉,肉的刚度K可以认为是很小,刀的刚度认为是很大,这样才能让肉随着刀的运动,而变化;现实世界里,我们人与外界接触的刚度往往不是固定的,而是变化的,举个例子,拍篮球,手在刚接触球的时候是偏柔性的,让手随着球而动,然后,手会变得刚性起来,让球随着手而动,这个刚度的控制,是人对自己手臂的主动控制,我们也希望机器人在处理力控任务的时候,能有这种自由控制刚度的能力;为什么需要这个“阻尼质量弹簧”模型呢? 擦玻璃的话,给玻璃施加一个恒力不就行了吗?想象一下,如果现在机械臂是对一块玻璃施加一个恒力F,然后突然撤开玻璃会怎样呢?
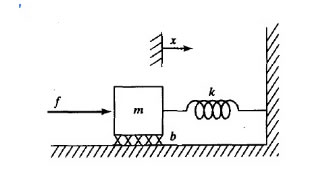
显然机械臂会失控,以最快速度向F的方向运动;但是如果有了“阻尼质量弹簧(BMK)”模型,当MBK三个参数调节得当的时候,机械臂就会以平滑的运动回到虚拟弹簧的原点;在这种情况下,我们控制机械臂与环境的接触,是通过控制机械臂末端的四个参数:虚拟质量M,虚拟阻尼B,虚拟刚度K,虚拟弹簧原点x0;控制这四个参数,我们可以让机械臂对外呈现各种力特征,来满足打磨抛光,精密装配,协作交互等需求现在我们目标明确了,要设计一个BMK模型,对机械臂进行控制,接下来怎么做呢?还是按照图9-6来分析,其中f是施加到系统的外力,xdot是速度,xdotdot是加速度,这是一个典型的二阶系统,有以下公式来描述系统的运动:
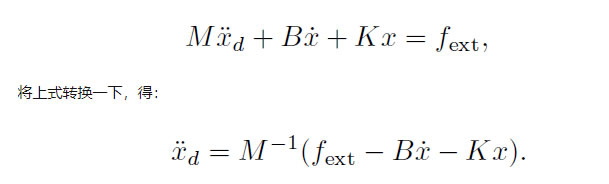
即已知MBK以及测得的外力、速度、位置,我们可以求出当前需要的加速度;这个加速度就是我们要控制的量;那怎么控制加速度?由于我们是离散系统,通过将xd积分两次,就得到了位置,所以,最终我们可以通过控制位置x,去实现这个模型,而且在伺服系统中,控制量通常是位置环,所以这种方式是合理的;那么既然最后都要控制位置x,那为什么刚开始不直接把公式,化成位置的表达式呢?因为化成位置的表达式,式中有加速度项,需要测量加速度项,而通常伺服系统中位置信息是由编码器得到的,而编码器只能获得位置反馈,其速度反馈是通过对位置的微分得到,而加速度是对速度微分得到,这个时候,由于经过了两次微分,得到的加速度信息往往是噪声非常大的,不适合使用;可以看到,我们这种方法,实际上,是通过控制位置来控制力的,俗称“导纳控制”;其实常用的还有另一种方法,是直接控制力,俗称“阻抗控制”,但这需要有关节力传感器的反馈,也要进行动力学建模,并且要能直接控制伺服驱动器的电流环,实现成本较大,这里就不叙述了;
一个例子:
控制器的位置环程序为3ms周期,其中包括一个导纳控制模块
导纳控制模块如下:
//x轴导纳模型
xdd = (fx0 - Bx*vx_now - Kx*(xnow-xbase))/Mx;
//加速度积分得到速度
xd = xd + xdd;
//y轴导纳模型
ydd = (fy0 - By*vy_now - Ky*(ynow-ybase))/My;
//加速度积分得到速度
yd = yd + ydd;
//将导纳模型的位置偏移计入,得到新的x轴y轴位置
xt = xd + xnow;
yt = yd + ynow;分别计算出x和y轴的导纳模型,将位置偏移量更新到新的目标位置
其中,fx0是笛卡尔坐标系中x轴向的外力,Bx是x轴向的阻尼值,vx_now是末端在x轴向的瞬时速度,Kx是x轴向的刚度,xnow是末端在x轴的瞬时位置,xbase是x轴的虚拟阻抗原点,Mx是x轴向的质量值。
通过导纳模型计算出加速度,由于此模块,是与位置环同周期的,在离散数学中,积分可简化为加法(类似于PID,如果不明白可以自行百度一下)
那么,怎样得到fx0呢?我使用了一个末端的六维力传感器,对传感器受的力进行坐标变换,得到x轴和y轴的外力fx0和fy0;
如何得到vx_now?首先从驱动器获得关节速度,通过雅克比变换,得到末端的x轴和y轴速度;
如何得到xnow?首先从驱动器获得关节位置,通过正运动学计算,得到末端的x和y轴位置
所以,大概是这样:
我们假设机械臂的末端是一个阻尼质量弹簧系统,当有了外力作用时,我们通过模型计算,这个虚拟的MBK系统的加速度,速度,位置应处于什么状态。最后,通过直接篡改位置环,去模拟一个MBK系统;
并且,你可以看出,x和y轴的MBK系统是解耦的,各自独立计算的。由于我的实验机械臂,只具有在xy轴平面内运动的能力,所以只考虑了x和y轴,一般的六自由度机械臂,应分别对x,y,z,rx,ry,rz六个自由度进行MBK解耦;




